The Nuclear and Applied Robotics Group, based in the University of Texas at Austin, has a mission to "develop and deploy advanced robotics in hazardous environments to minimize risk for the human operator."
 University of Texas "opens Doors" to Safer Nuclear Waste Retrieval
University of Texas "opens Doors" to Safer Nuclear Waste Retrieval
Nicole Lobo | Clearpath Robotics
Reprinted with permission from Clearpath Robotics:
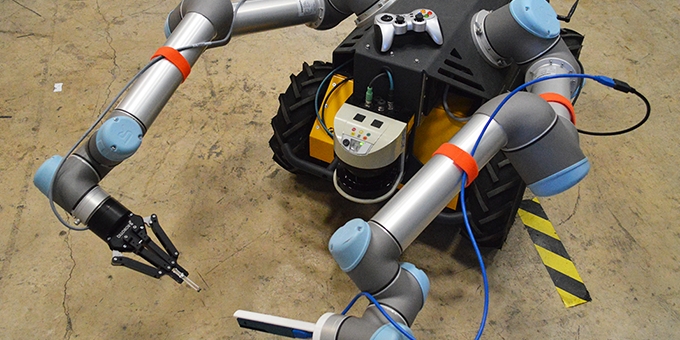
The Nuclear and Applied Robotics Group, based in the University of Texas at Austin, has a mission to “develop and deploy advanced robotics in hazardous environments to minimize risk for the human operator.” The group, represented by Andy Zelenak (Postdoc) and Mitchell Pryor (Research Scientist), is accomplishing this with VaultBot – a Husky-based mobile manipulation platform that handles nuclear waste and other materials that are hazardous to humans.
The main focus of the VaultBot project is mobile manipulation. The robot excels at contact tasks like turning valves, pushing buttons, shutting off high-voltage switches and opening doors. The robot was originally intended to retrieve nuclear materials from a vault in Los Alamos National Laboratory. The radiation dose rates in the vault aren’t high enough to harm a human immediately but exceeding annual dose limits could be a problem for humans after even a few hours.
This video illustrates the use of compliance and real-time jogging in ROS to open a door.
VaultBot’s Husky base is equipped with dual UR5 manipulators and a RealSense D435 depth camera. In terms of technical processes, VaultBot performs SLAM (simultaneous localization and mapping) and task planning, but its number one priority is manipulation. The group has been working on real-time, reactive control of manipulators in ROS, which is really important when contact with the environment is involved.
“We are trying to push the state of the art in ROS, making it possible for anybody with a ROS robot to perform seemingly-simple things like open a door”, says Zelenak. “A few years ago, it was only the very large, well-funded teams at the DARPA Robotics Challenge who could handle these contact tasks. In a few years, I predict dozens of groups around the world will be able to do it.” Most of the software used in the project is open-sourced, and can be found here.
There are of course many challenges that are involved with the project. Though many of the issues in deploying a robot at Los Alamos have more to do with security than robotics-related issues (e.g restrictions related to wireless communication and cameras), there are some technical challenges. The action of turning a valve is easy for a human but still very difficult for robots. Quite a few things need to go right. Some of the challenges the team face are:
- Locating the goal in space and planning a path to get there;
- Calculating a base position where the goal is reachable;
- Visualizing the reach of the arm in real-time;
- Ensuring that motion planning of the arm is well-behaved;
- Dealing with uncertainty, especially after making contact with the environment. Large forces can build up quickly!
- Developing improved supervisory control techniques to handle the complex environments, tasks, and improved error recovery. Robot capabilities have improved fast and state machines don’t cut it anymore.
- Improved human/machine interfaces for various levels of autonomy, from pure teleoperation to supervision of largely autonomous systems.
Clearpath has helped address these challenges by proving a reliable mobile robotic platform that supports ROS out of the box. According to Zelenak, ”Reliability is a big deal for us. Fixing the hardware failures on other robots takes up a big chunk of time that we would rather spend researching. He adds, “I believe VaultBot was the first dual-arm Husky that Clearpath ever sold and Clearpath worked with the University to finalize the system design and meet our requirements. We liked the fact that the manipulators are industrial-grade and all parts of the robot can interface easily with ROS.”
Through this project, the group has created a new industry partnership with an international company that is quickly developing serious mobile manipulation capabilities. The company is investigating how Clearpath platforms could be used to perform remote inspection and maintenance at their facilities.
The Nuclear and Applied Robotics Group and the VaultBot have both gained notoriety. The paper that the group presented at the 2018 WM symposium was chosen as a superior paper. The team was also selected for presentation at the 2018 Sprint Robotics Conference on Inspection and maintenance robots. Three additional publications in the past year include:
- Valner, R., Kruusamae, K., and Pryor, M., “TeMoto: Intuitive multi-range telerobotic system with natural gestural and verbal instruction interface,” Robotics, 7(1):9 (21 pages), February 2018. (featured cover article)
- Vunder, V., Valner, R., McMahon, C., Kruusamae, K, and Pryor, M., “Improved situational awareness in ROS using panospheric vision and virtual reality,” The 11th IEEE International Conference on Human System Interaction, Gdansk, Poland, July 2018.
- Valner, R., Vunder, V., Zelenak, A., Pryor, M., Aabloo, A., and Kruusamae, K., “Intuitive ‘human-on-the-loop’ interface for tele-operating remote mobile manipulator robots,” International symposium on artificial intelligence, robotics, and automation in space (i-SAIRAS), Madrid, Spain, June 2018.
The team is in the midst of preparing multiple papers for ICRA2019 (International Conference on Robotics and Automation), one of which examines real-time control of manipulators in ROS and how that helps complete tasks such as opening a door.
The content & opinions in this article are the author’s and do not necessarily represent the views of RoboticsTomorrow
Featured Product

